ФИЗИКА
1.1.1. Кинематика материальной точки
Существует три способа описания движений точки. Мы рассмотрим два из них: векторный и координатный.
Векторный способ. В этом способе положение интересующей нас материальной точки А задают радиусом-вектором  , проведённым из некоторой неподвижной точки О выбранной системы отсчёта в точку А (рис. 1.1.1).
, проведённым из некоторой неподвижной точки О выбранной системы отсчёта в точку А (рис. 1.1.1).
Рис. 1.1.1 |
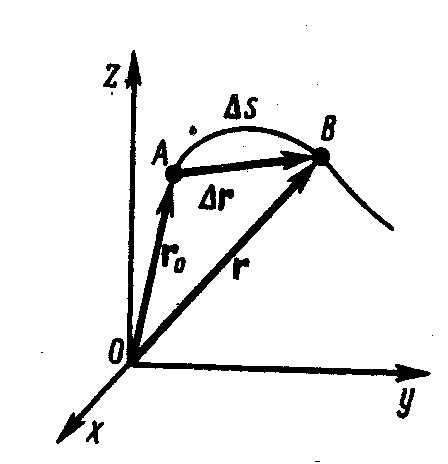
При движении материальной точки А её радиус-вектор меняется в общем случае как по модулю, так и по направлению, т.е. радиус-вектор  зависит от времени t. Геометрическое место концов радиус-вектора
зависит от времени t. Геометрическое место концов радиус-вектора  называют траекторией точки А. Длина участка траектории 1-2, пройденного материальной точкой, называется длиной пути
называют траекторией точки А. Длина участка траектории 1-2, пройденного материальной точкой, называется длиной пути  .
.  является скалярной функцией времени
является скалярной функцией времени  . Вектор
. Вектор ![]() называется вектором перемещения. Он представляет собой приращение радиуса вектора
называется вектором перемещения. Он представляет собой приращение радиуса вектора  за время перемещения
за время перемещения  :
:
 .
.
Для характеристики быстроты движения и его направления вводится векторная величина – скорость.
Вектором средней скорости  называется отношение вектора перемещения к промежутку времени
называется отношение вектора перемещения к промежутку времени  :
:
(1.1.1)
 .
.
Вектор  совпадает по направлению с
совпадает по направлению с ![]() .
.
При неограниченном уменьшении  средняя скорость стремится к предельному значению, которое называется мгновенной скоростью
средняя скорость стремится к предельному значению, которое называется мгновенной скоростью  :
:
(1.1.2)
 .
.
Так как секущая в пределе совпадает с касательной, то вектор скорости  направлен по касательной к траектории в сторону движения (рис. 1.1.2).
направлен по касательной к траектории в сторону движения (рис. 1.1.2).
Модуль мгновенной скорости определяется соотношением:
(1.1.3)
 .
.
При неравномерном движении модуль мгновенной скорости с течением времени изменяется. В этом случае пользуются скалярной величиной  - средней скоростью неравномерного движения:
- средней скоростью неравномерного движения:
(1.1.4)
 .
.
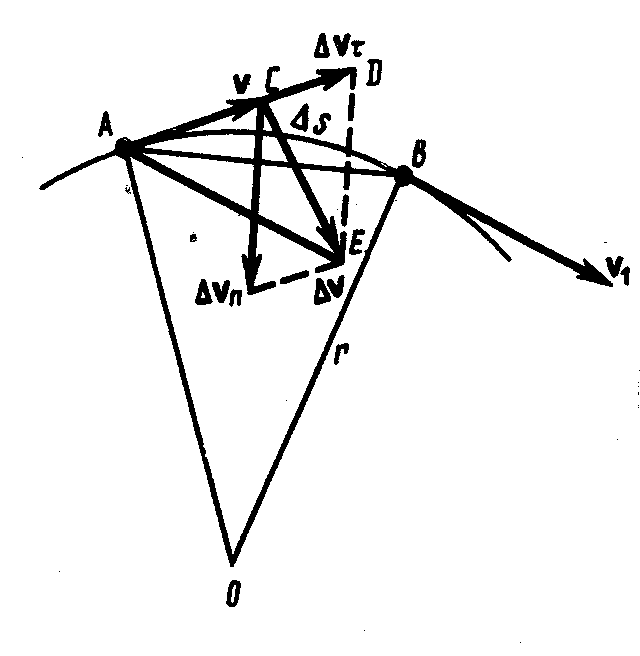
Ускорение и его составляющие. В случае неравномерного движения важно знать, как быстро изменяется скорость с течением времени. Физической величиной, характеризующей быстроту изменения скорости по модулю и направлению, является Рассмотрим плоское движение, т.е. движение при котором все участки траектории точки лежат в одной плоскости. Пусть вектор  задаёт скорость точки А в момент времени t. За время
задаёт скорость точки А в момент времени t. За время  движущаяся точка перешла в положение В и приобрела скорость, отличную от
движущаяся точка перешла в положение В и приобрела скорость, отличную от  как по модулю, так и по направлению и равную
как по модулю, так и по направлению и равную  .
.
Перенесём вектор  в точку А и найдём
в точку А и найдём  (рис. 1.1.2).
(рис. 1.1.2).
Рис. 1.1.2 |
Средним ускорением неравномерного движения в интервале от t до Δt, называется векторная величина, равная отношению изменения скорости  к интервалу времени
к интервалу времени  :
:
(1.1.5)
 .
.
Мгновенным ускорением  материальной точки в момент времени t будет предел среднего ускорения:
материальной точки в момент времени t будет предел среднего ускорения:
(1.1.6)
 .
.
Таким образом, ускорение есть векторная величина, равная первой производной скорости по времени.
Разложим вектор  на две составляющие. Для этого из точки А (рис. 1.1.2) по направлению скорости
на две составляющие. Для этого из точки А (рис. 1.1.2) по направлению скорости  отложим вектор АД, по модулю равный
отложим вектор АД, по модулю равный  . Очевидно, что вектор
. Очевидно, что вектор  , равный
, равный  , определяет изменение скорости за время
, определяет изменение скорости за время  по модулю
по модулю  . Вторая же составляющая
. Вторая же составляющая  вектора
вектора  характеризует изменение скорости за время
характеризует изменение скорости за время  по направлению.
по направлению.
Тангенциальная составляющая ускорения
(1.1.7)
 ,
,
т.е. равна первой производной по времени от модуля скорости, определяя тем самым быстроту изменения скорости по модулю.
Найдём вторую составляющую ускорения. Допустим, что точка В достаточно близка к точке А, поэтому  можно считать дугой окружности некоторого радиуса r, мало отличающейся от хорды АВ. Тогда из подобия треугольников АОВ и ЕАД следует
можно считать дугой окружности некоторого радиуса r, мало отличающейся от хорды АВ. Тогда из подобия треугольников АОВ и ЕАД следует  , но так как
, но так как  , то
, то
 .
.
В пределе при ∆t → 0 получим  . Поскольку
. Поскольку  угол ЕАД стремится к нулю, а так как треугольник ЕАД равнобедренный, то угол между
угол ЕАД стремится к нулю, а так как треугольник ЕАД равнобедренный, то угол между  и
и  стремится к прямому. Следовательно, при ∆t → 0 векторы
стремится к прямому. Следовательно, при ∆t → 0 векторы  и
и  оказываются взаимно перпендикулярными. Так как вектор скорости направлен по касательной к траектории, то вектор
оказываются взаимно перпендикулярными. Так как вектор скорости направлен по касательной к траектории, то вектор  направлен к центру её кривизны. Вторая составляющая ускорения, равная
направлен к центру её кривизны. Вторая составляющая ускорения, равная
(1.1.8)
называется нормальной составляющей ускорения и направлена по нормали к траектории к центру её кривизны.
Полное ускорение тела есть геометрическая сумма тангенциальной и нормальной составляющих (рис. 1.1.3)
Рис. 1.1.3 |
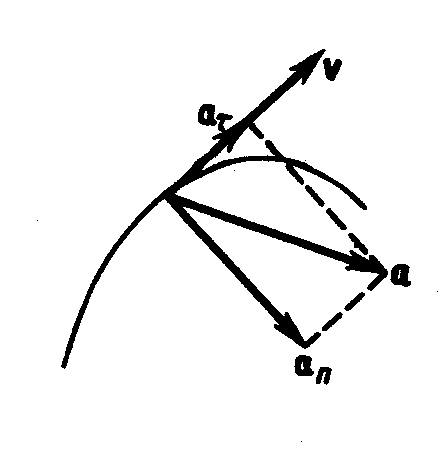
(1.1.9)
 ;
;
(1.1.10)
 .
.
Таким образом, зная зависимость  , можно, используя вышеприведённые соотношения, найти скорость
, можно, используя вышеприведённые соотношения, найти скорость  и ускорение
и ускорение  материальной точки в каждый момент времени. Это прямая задача кинематики.
материальной точки в каждый момент времени. Это прямая задача кинематики.
Возникает и обратная задача: можно ли найти  и
и  , зная зависимость от времени ускорения
, зная зависимость от времени ускорения  ?
?
Оказывается, для получения однозначного решения этой задачи одной зависимости  недостаточно, необходимо ещё знать так называемые начальные условия, а именно скорость
недостаточно, необходимо ещё знать так называемые начальные условия, а именно скорость  и радиус-вектор
и радиус-вектор  точки в некоторый начальный момент t = 0. Чтобы в этом убедиться, рассмотрим простейший случай, когда в процессе движения ускорение точки
точки в некоторый начальный момент t = 0. Чтобы в этом убедиться, рассмотрим простейший случай, когда в процессе движения ускорение точки  .
.
Сначала определим скорость точки  . Согласно (1.6), за промежуток времени dt элементарное приращение скорости
. Согласно (1.6), за промежуток времени dt элементарное приращение скорости  , найдём приращение вектора скорости за это время:
, найдём приращение вектора скорости за это время:
 .
.
Но величина  - это ещё не искомая скорость
- это ещё не искомая скорость  . Чтобы найти
. Чтобы найти  , необходимо знать скорость
, необходимо знать скорость  в начальный момент времени. Тогда
в начальный момент времени. Тогда  , или
, или
(1.1.11)
Аналогично решается вопрос и о радиус-векторе  точки. Согласно (1.1.2), за промежуток времени элементарное приращение радиус-вектора
точки. Согласно (1.1.2), за промежуток времени элементарное приращение радиус-вектора  . Интегрируя это выражение с учётом (1.1.11), определим приращение радиуса-вектора за время от t = 0 до t:
. Интегрируя это выражение с учётом (1.1.11), определим приращение радиуса-вектора за время от t = 0 до t:
Для нахождения самого радиус-вектора  необходимо знать ещё положение точки
необходимо знать ещё положение точки  в начальный момент времени. Тогда
в начальный момент времени. Тогда  , или
, или
 .
.
Координатный способ. В этом способе с телом отсчёта жёстко связывают определённую систему координат. На рис. 1.1.1 с телом отсчёта связана, декартова система координат x, y, z.
Запишем проекции на оси x, y, z радиус-вектора  , характеризующего положение интересующей нас точки А относительно начала координат О в момент t:
, характеризующего положение интересующей нас точки А относительно начала координат О в момент t:
 .
.
Зная зависимости этих координат от времени – закон движения точки, можно найти положение точки в каждый момент времени, её скорость и ускорение. Действительно, спроектировав (1.1.2) и (1.1.6), например, на ось х, получим формулы, определяющие проекции векторов скорости и ускорения на эту ось:
(1.1.12)
 ,
,
где dx - проекция вектора перемещения  на ось х;
на ось х;
(1.1.13)
 ,
,
где  - проекция вектора приращения скорости
- проекция вектора приращения скорости  на ось х. Аналогичные соотношения получаются для y- и z-проекций соответствующих векторов. Из этих формул видно, что проекции векторов скорости и ускорения равны соответственно первой и второй производным координат по времени. Зная проекции векторов, можно найти модуль и направление векторов
на ось х. Аналогичные соотношения получаются для y- и z-проекций соответствующих векторов. Из этих формул видно, что проекции векторов скорости и ускорения равны соответственно первой и второй производным координат по времени. Зная проекции векторов, можно найти модуль и направление векторов  и
и  в любой момент времени. Например, модуль вектора скорости
в любой момент времени. Например, модуль вектора скорости
 ,
,
направление же вектора  задаётся направляющими косинусами
задаётся направляющими косинусами
 ,
,
где α, β, γ - углы между вектором  и осями x, y, z соответственно. Аналогичными формулами определяются модуль и направление вектора ускорения.
и осями x, y, z соответственно. Аналогичными формулами определяются модуль и направление вектора ускорения.
Кроме этого можно решить и ряд других вопросов: найти траекторию точки, зависимость пройденного ею пути от времени, зависимость скорости от положения точки и т.д.
Решение обратной задачи – нахождение скорости и закона движения точки по заданному ускорению – проводится, как и в векторном способе, путём интегрирования (в данном случае проекций ускорения по времени), причём задача и здесь имеет однозначное решение, если кроме ускорения заданы ещё и начальные условия: проекции скорости и координаты точки в начальный момент времени.
к к к